Tänavakuritegevus on moodsal sajandil väga levinud. Kõik peavad kodus või öösel magades või päeval magades olema turvalised. Nii on turul saadaval palju valvesignalisatsioonisüsteeme. Need süsteemid on väga tõhusad, kuid kulukad. A sissemurdja alarm või sissetungija häire on põhimõtteliselt elektrooniline seade, mis annab kodus sissetungija tuvastamisel alarmi. Saame kodus teha sissetungija alarmi vooluringi, mis on teatud vahemaade jaoks peaaegu sama efektiivne ja mille kulud on väga madalad.

Turvahäire
See artikkel räägib sissetungija alarmi tegemisest Arduino ja PIR anduri abil. Kui PIR-andur tuvastab sissetungija, saadab see Arduinole signaali ja Arduino annab alarmi. See vooluring on väga lihtne ja kujundatakse Veroboardile. Seda Veroboard paigaldatakse maja sellesse kohta, kus on suurem sissetungija oht koju siseneda.
Kuidas kujundada PIR-anduril põhinevat sissetungijate alarmi?
Parim lähenemine mis tahes projekti alustamiseks on koostada komponentide loetelu ja teha nende komponentide lühitutvustus, sest keegi ei taha jääda projekti keskele lihtsalt puuduva komponendi tõttu. Koostame komponentide loendi, ostame need ja alustame projektiga. Vero Board on eelistatud vooluahela riistvaral kokkupanekuks, sest kui me paneme leivaplaadile komponendid kokku, võivad nad sellest eralduda ja vooluahel muutub lühikeseks, seega on eelistatud Veroboard.
1. samm: komponentide (riistvara) kogumine
- 10k-oomi takisti
- LED
- Summeri
- 9 V aku
- 9 V akuklamber
- Veroboard
- Juhtmete ühendamine
- Digitaalne mitme meeter
2. samm: vajalikud komponendid (tarkvara)
- Proteus 8 Professional (saab alla laadida saidilt Siin )
Pärast Proteus 8 Professionali allalaadimist kujundage sellele vooluring. Lisasin siia tarkvarasimulatsioonid, et algajatel oleks mugav vooluahelat kujundada ja riistvaral asjakohaseid ühendusi luua.
3. samm: vooluringi töö
Selle vooluahela töö on väga lihtne. Esmalt seatakse PIR-anduri olekuks LOW. see tähendab, et liikumist ei tuvastata. Kui PIR-andur tuvastab liikumise, saadab see signaali mikrokontrollerile. Seejärel lülitab mikrokontroller sisse summeri ja LED-i. Kui liikumist ei tuvastata, jäävad valgusdiood ja helisignaal välja.
4. samm: komponentide kokkupanek
Nüüd, kui teame oma projekti peamisi ühendusi ja ka kogu vooluahelat, liigume edasi ja alustame oma projekti riistvara valmistamist. Tuleb meeles pidada ühte asja, et vooluring peab olema kompaktne ja komponendid asetama nii lähedale.
- Võtke Veroboard ja hõõruge selle külge vaskkattega kaabitsapaberiga.
- Nüüd asetage komponendid ettevaatlikult ja piisavalt lähedale, nii et vooluahela suurus ei muutuks väga suureks
- Võtke kaks tükki naissoost päiseid ja asetage see Veroboardile nii, et nende vaheline kaugus peaks olema võrdne Arduino nano pardal laiusega. Nendesse naispäistesse paigaldame hiljem Arduino nanoplaadi.
- Tehke ühendused ettevaatlikult jootekolvi abil. Kui ühenduste loomisel tehakse mõni viga, proovige ühendus tühistada ja ühendus uuesti korralikult jootma, kuid lõpuks peab ühendus olema tihe.
- Kui kõik ühendused on loodud, tehke järjepidevuse test. Elektroonikas on järjepidevuskatse elektriskeemi kontrollimine, et kontrollida, kas vool voolab soovitud rajal (et see on kindlasti kogu vooluahel). Järjepidevuskatse viiakse läbi väikese pinge (juhtmega valgusdioodi või juhtmega, näiteks piesoelektrilise kõlariga ühendatud juhtmega) seadmisega valitud viisil.
- Kui järjepidevuskatse läbib, tähendab see, et vooluring on vastavalt soovile piisavalt tehtud. Nüüd on see testimiseks valmis.
- Ühendage aku vooluahelaga.
Nüüd kontrollige kõiki ühendusi, vaadates allpool toodud skeemi:

Vooluringi skeem
5. samm: Arduinoga alustamine
Kui te pole Arduino IDE-ga juba tuttav, ärge muretsege, sest allpool on selgitatud samm-sammult protseduuri Arduino IDE seadistamiseks ja kasutamiseks mikrokontrolleriplaadiga.
- Laadige alla Arduino IDE uusim versioon saidilt Arduino.
- Ühendage oma Arduino Nano plaat sülearvutiga ja avage juhtpaneel. klõpsake juhtpaneelil nuppu Riistvara ja heli . Nüüd klõpsake nuppu Seadmed ja printerid. Siit leiate porti, millega teie mikrokontrolleri plaat on ühendatud. Minu puhul on see nii KOM14 kuid see on erinevates arvutites erinev.
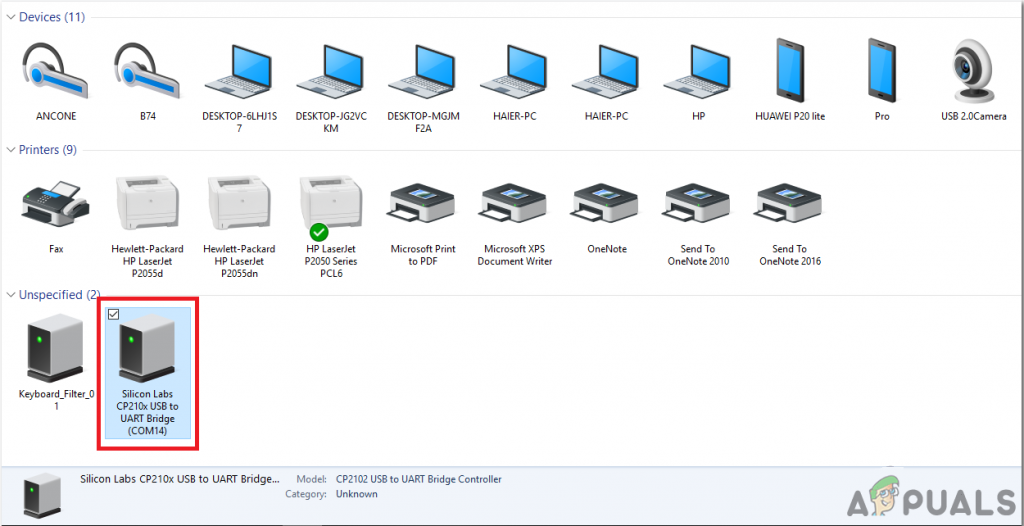
Sadama leidmine
- Klõpsake menüüd Tööriist. ja seadke tahvel asendisse Arduino Nano rippmenüüst.
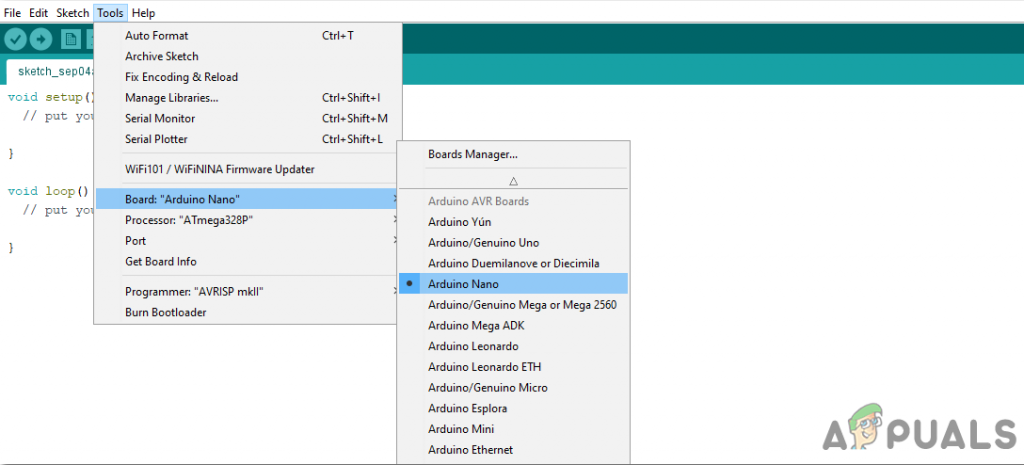
Laua määramine
- Määrake samas menüüs Tööriist portiks pordinumber, mida olete enne Seadmed ja printerid .
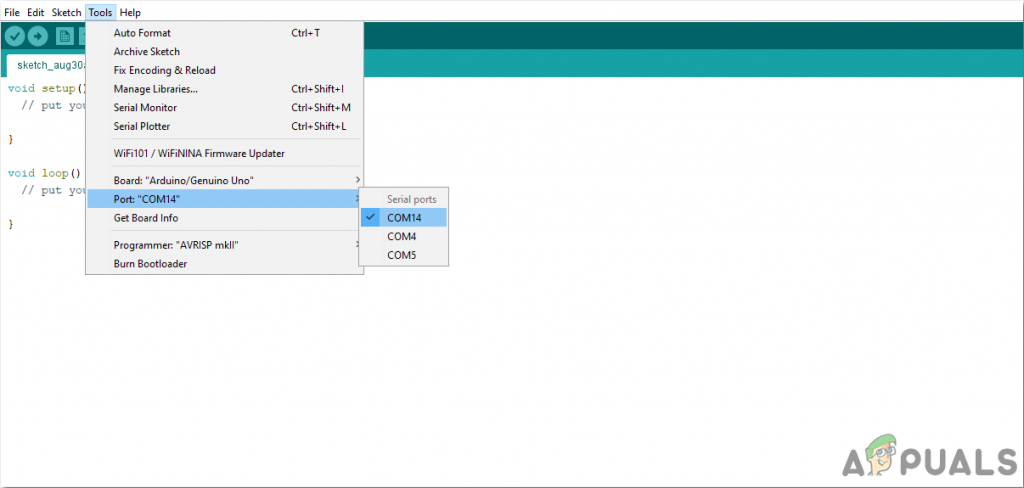
Pordi seadistamine
- Valige samas menüüs Tööriist protsessor ATmega328P (vana alglaadur).
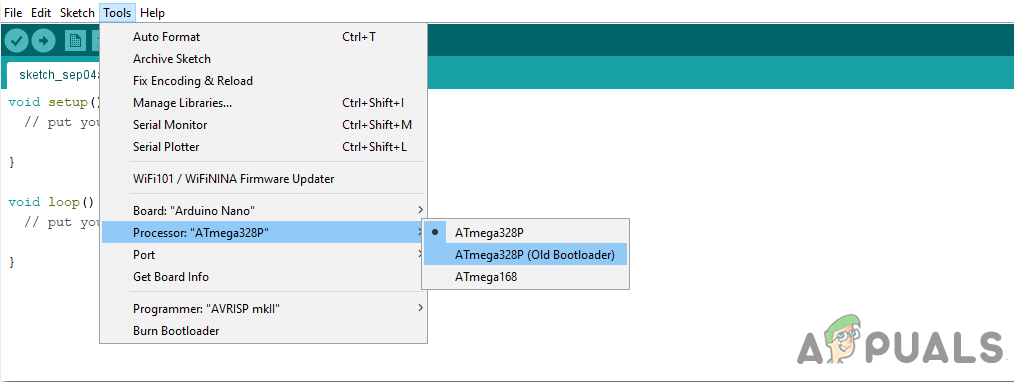
Protsessor
- Laadige alla allolev kood ja kleepige see oma Arduino IDE-sse. Klõpsake nuppu Laadi üles nupp mikrokontrolleri plaadil oleva koodi kirjutamiseks.
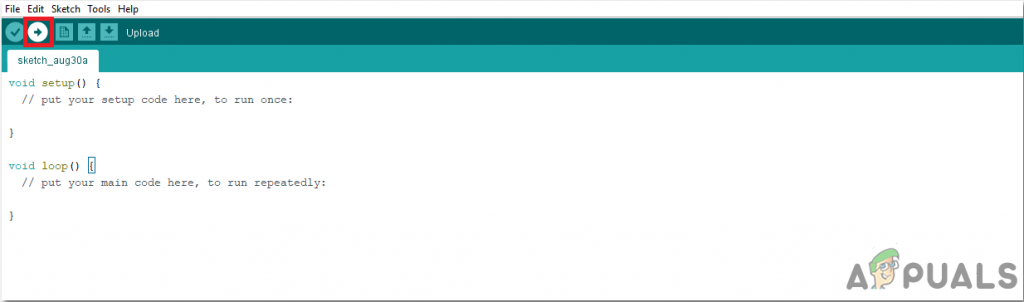
Laadi üles





Koodi allalaadimiseks kliki siia.
6. samm: koodeksist aru saamine
Selle projekti kood on üsna hästi kommenteeritud ja väga arusaadav. Kuid siiski selgitatakse seda lühidalt allpool.
1. Alguses lähtestatakse Arduino tihvtid, mis ühendatakse hiljem LED-i ja summeriga. Samuti deklareeritakse muutuja, mis salvestab töötamise ajal mõned väärtused. Seejärel seatakse PIRi algolekuks LOW, mis tähendab, et öeldakse, et algselt ei tuvastata liikumist.
int ledPin = 5; // vali LED-i tihvt int Buzzer = 6; // vali nööpsuustiku sisendPin = 2; // vali sisendnõel (PIR-anduri jaoks) int pirState = LOW; // alustame, eeldades, et liikumist ei tuvastatud int val = 0; // muutuja pin-oleku lugemiseks ja salvestamiseks edaspidiseks kasutamiseks
2. kehtetu seadistamine () on funktsioon, milles lähtestame Arduino plaadi tihvtid, mida kasutatakse sisendina või väljundina. Selles funktsioonis on seatud ka ülekandekiirus. Baudi kiirus on bitti sekundis kiirus, mille abil mikrokontroller suhtleb väliste seadmetega.
void setup () {pinMode (ledPin, OUTPUT); // deklareerida LED väljundina pinMode (Buzzer, OUTPUT); // kuulutada summeri väljundiks pinMode (inputPin, INPUT); // deklareerige andur sisendina Serial.begin (9600); // määra edastuskiirus võrdseks 9600}3. void loop () on funktsioon, mis töötab ikka ja jälle silmusena. Selles funktsioonis on mikrokontroller programmeeritud, nii et kui see tuvastab liikumise, saadab see signaali summerile ja valgusdioodile ning lülitab need sisse. Kui liikumist ei tuvastata, ei tee see midagi.
void loop () {val = digitalRead (inputPin); // loe PIR-anduri sisendväärtust if (val == HIGH) // Kui enne {digitalWrite (ledPin, HIGH) tuvastatakse liikumine; // lülitage LED sisse DigitalWrite (Buzzer, 1); // lülitage suve sisse viivitus (5000); // looge viie sekundi viivitus, kui (pirState == LOW) {// kui olek on algselt madal, tähendab, et enne ei leitud liikumist // me oleme just sisse lülitanud Serial.println ('Liikumine tuvastatud!'); // Prindige oon seeriamonitor, et liikumine on tuvastatud pirState = HIGH; // pirState on seatud HIGH}} else {digitalWrite (ledPin, LOW); // lülita LED välja digitalWrite (Buzzer, 0); // lülitage summeri VÄLJAS, kui (pirState == KÕRGE) {// kui olek on algselt KÕRGE, tähendab see, et mõni liikumine tuvastati enne, kui // me just lülitasime välja Serial.println ('Liikumine lõppes!'); // Trükkige seeriamonitorile, et liikumisel oleks lõpp pirState = LOW; // pirState on seatud LOW}}}Nii et see oli kogu protseduur PIR-anduri abil kodus valvesignalisatsiooni vooluahela valmistamiseks. Nüüd saate hakata tööle ja ise luua odava ja tõhusa valvesignalisatsiooni.